


干货速递|轻松拿捏,就靠它!
发布时间:
2024-02-07 00:00
来源:

手的13种基本功能你知道有哪些吗?
分别是悬垂、托举、触摸、推压、击打、动态操作、球形抓握、球形指尖握、柱状抓握、勾拉、二指尖捏、多指尖捏和侧捏。
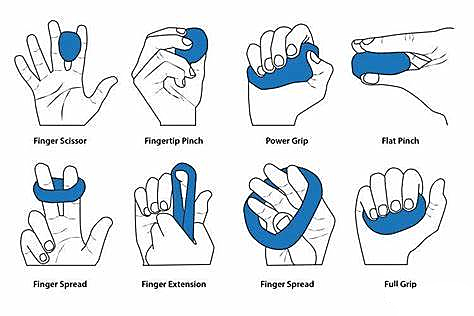
而由指尖完成的动作那可就多了,抓、握、夹、捏、推、拉等等……那么机器人是怎样像人一样完成这些动作的呢?
这就要在机器人的灵巧手上装入力传感器,通过数据的反馈帮助机器人更好地判断和控制输出的力,从而完成一系列的动作。
人的手指面积大概是1平方厘米,这么小的地方,怎么装得进去一个力传感器呢?
当当当当!用这个!华力创科学的Photon micro 六维力传感器就可以啦!

它的直径只有6mm,配合高维复杂曲面触碰点位估计算法,就可以进一步获取到每次触碰的力觉方位信息!
有了它,机器人的灵巧手才能像人类的指尖一样进行触摸、抓握,甚至按摩、打字啦!
点击下方视频,了解完整的灵巧手触觉感知解决方案~
更多新闻推荐

中央港澳工作办公室主任、国务院港澳事务办公室主任夏宝龙一行体验华力创科学光学力传感技术
2025-02-12
广东省省长王伟中、香港特首李家超等一行体验华力创科学具身智能机器人力觉解决方案
2025-03-25
2025-05-07
2025-05-06
2025-04-27
面对美国挑起的关税战?深圳的科创企业们怕了吗?是挑战还是机遇?来看看他们怎么说
2025-04-25
